Robotic Fabrication Project KUKABAE
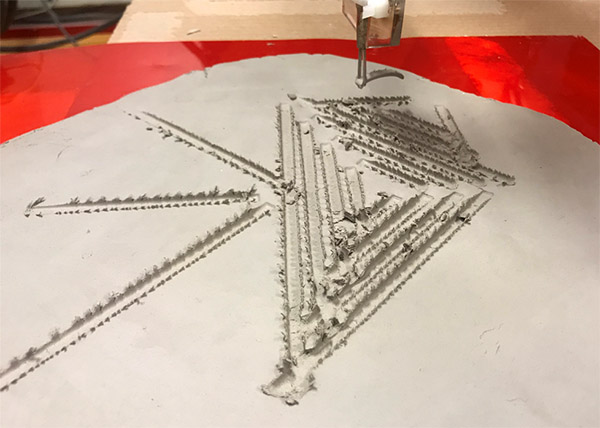
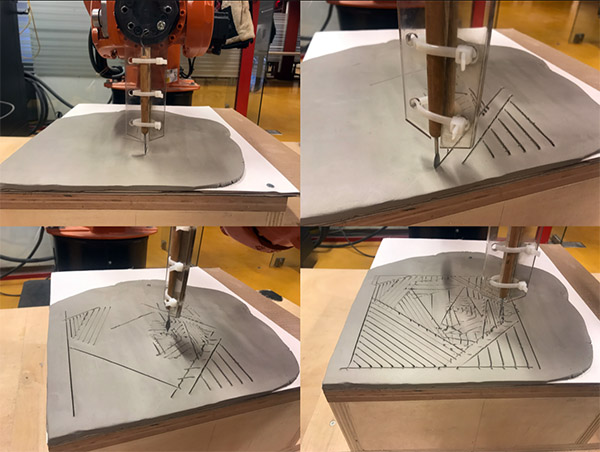
I will try to explain the student project called KUKABAE that was developed in my Robotic Fabrication elective course in 2018. This was a very interesting project. Initially, the students were doing the design to attach an ordinary pen holder to the robot. but then the project changed by chance. they decided to replace a pen holder with a ceramic knife. As seen in the video and pictures, the relationship between the material and the instrument became more complicated and fun. Thanks to the code we wrote with the students, the robot was changing its position and orientation according to the direction of the lines it scratched on the ceramic plate. Because only one side of the blade could remove the ceramic. Finally, we tested another knife again with orientation control. I would like to thank the students: İpek Dağarcıklıoğlu, Nil Gürbüz, Gülfem Böke, and İnci Demirel for this study.

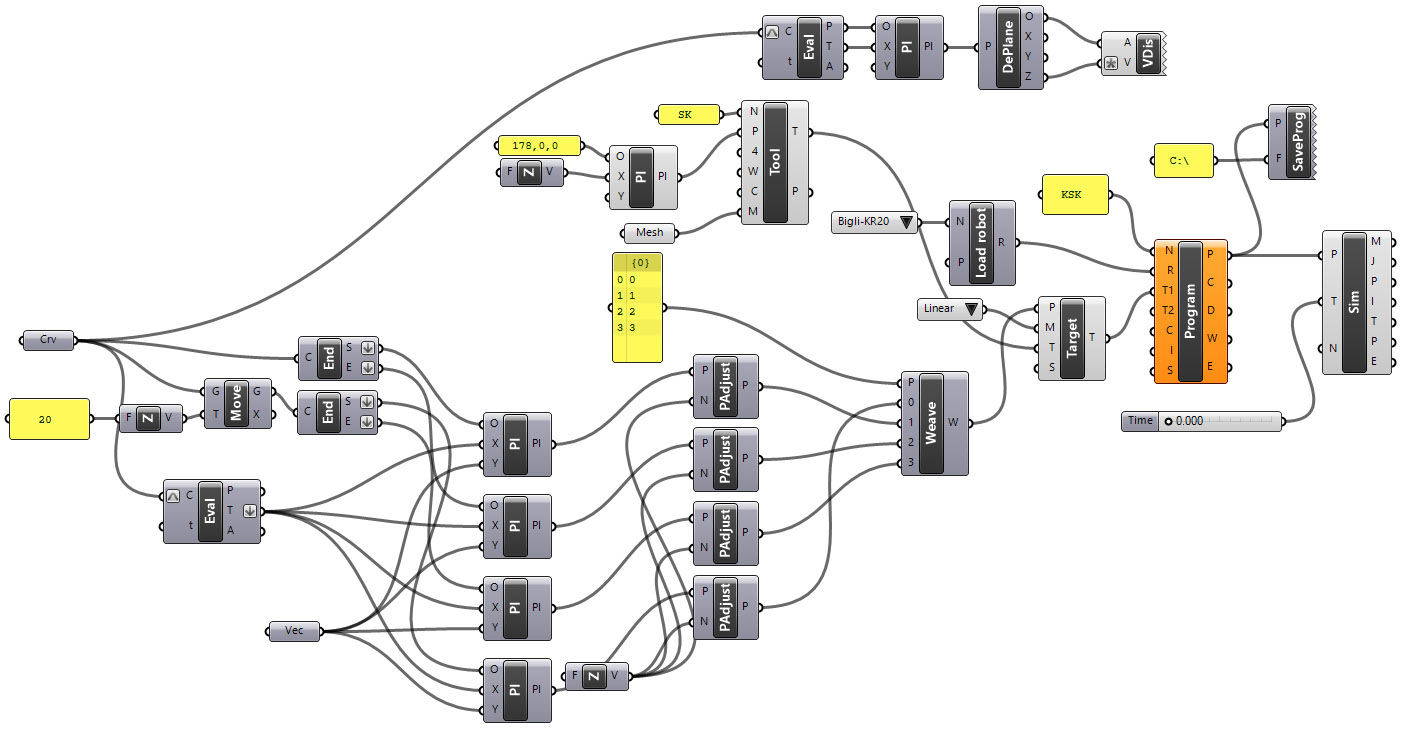
Below are the digital files we used in this project. You should install the Robots add-on and choose Kuka KR-20 as the robot reference file. Of course, testing the Robotic Fabrication Student Project KUKABAE as it is could be difficult. Because the material properties and the cutter tool must be identical. We are using the “Bigli-KR20” robot library files. You can find it in visose/Robots GitHub repository. However, I updated the Robots add-on and the below definition on 29.11.2022.







