Robotic Chopstick Digger Exercise
Today, we tried to understand one of the ways of generating multiple planes in Grasshopper. This is an important step in utilizing the robot program efficiently. Instead of manually jogging the robot, we designed the path that the robot will dig lots of chopsticks. In the “Robotic Chopstick Digger Exercise”, every student designed their own paths and decided the height, orientation, and number of sticks to be dug on an EPS block. I provided the Rhino and Grasshopper files with about %80 ready-made. We entered extra commands such as waiting 3 seconds in the home position to be re-loaded by the student. Also, I realized that the length and the straightness of the chopsticks are very important parameters for such exercises.
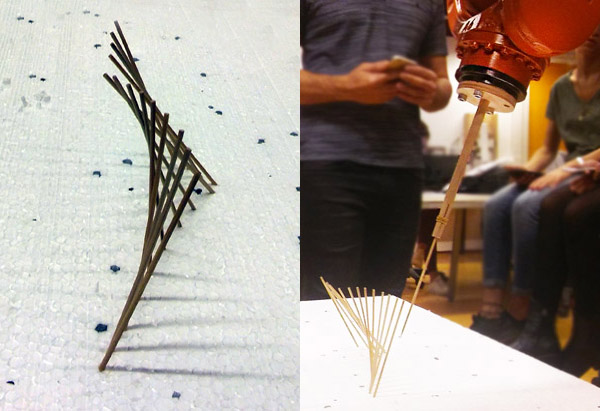
Students set their own path curves and run the definition, creating the robot program. Finally, we managed to run the robot in automatic mode. They feed the chopsticks in the home position, while the robot is digging them one by one. In a 3-hour session, we managed to generate and run a very interesting variety of results. Below are two of them. This encouraged me to further advance the topics in the upcoming weeks.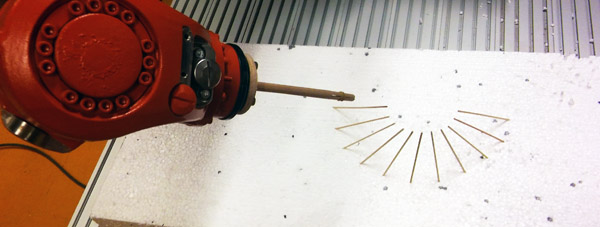
We created a robotic chopstick digger exercise tool with our carpenter Rahman usta. We used these digital files in this exercise. Please note that in order to run these files, you need to have Rhino 5 and Grasshopper 0.9.0076 with Robots add-on and “Bigli” robot files installed. Rhino 5.0 file and Grasshopper 0.9.0076 definition (The files still work in Rhino 7 and the new Robots add-on: 12.12.2022)
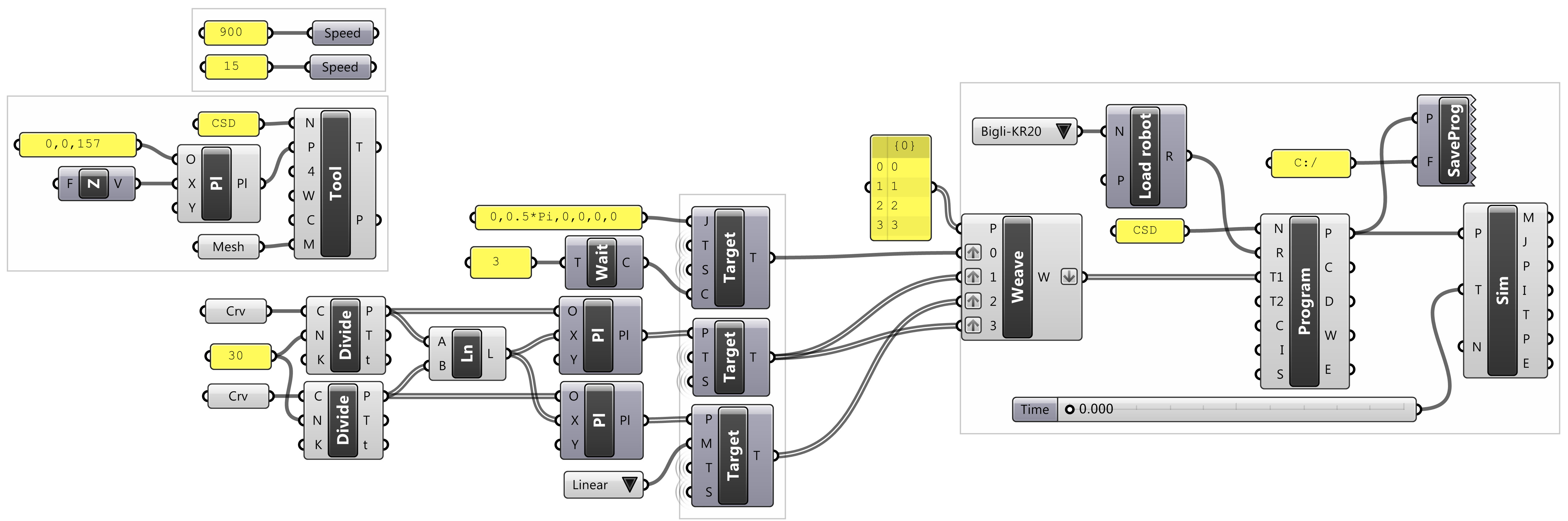
Here is a quick screenshot of how everything works on-screen:







