Parametric Tool Designer for KUKA PRC
In architectural research, a significant challenge in robotic fabrication is replicating setups due to the unique configurations used in each study. There is a lack of a unified software platform connecting various researchers and their robotic setups. Additionally, the fabrication tools are typically not open-source and may not be versatile across different scenarios. I suggest using Grasshopper’s parametric modeling capabilities to address these challenges to create flexible robotic tools. Specifically, I’ve developed a definition that allows the design of tools. They are compatible with all robots in the KUKA PRC add-on for Grasshopper. KUKA PRC is widely used and recognized, making it an excellent foundation for this study. I collected flange data for all supported robots, enabling the creation of adaptable and parametric tools. I included an example tool to demonstrate the potential of this Parametric Tool Designer for KUKA PRC.
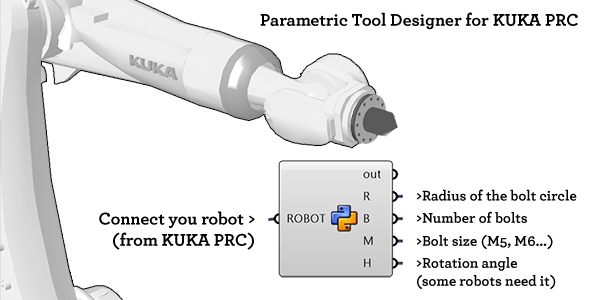
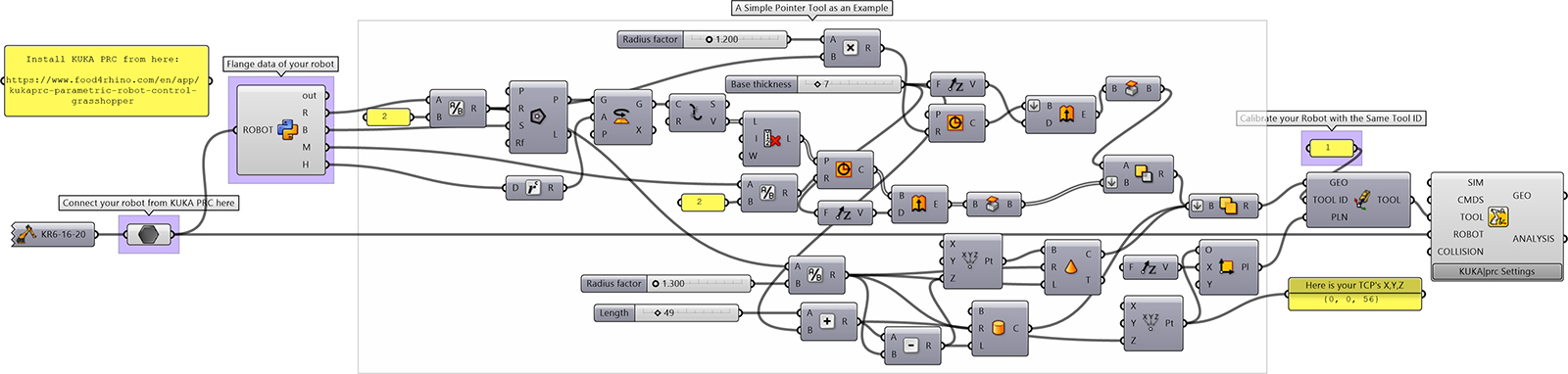
The Grasshopper definition features a Python script that outputs parameters like the bolt circle radius (R), the number of bolts (B), their size (M), and an optional rotation angle (H) around the flange. Additionally, I included an example, a parametric pointer tool, that fits all KUKA robots. Outputs include the 3D-printable model of the tool, the Tool Center Point (TCP) coordinates, and the Tool ID. The TCP coordinates facilitate tool calibration on the robot using the direct input method, avoiding needing a four-point calibration process. The definition requires the KUKA PRC add-on for robot information and uses native Grasshopper components.
As an independent developer with no affiliation to KUKA PRC or Robots in Architecture, I offer this tool as part of my work. However, if you find it valuable, consider supporting me on Patreon, where you can access the Grasshopper file for the Parametric Tool Designer for KUKA PRC and more. Thank you!