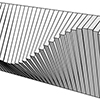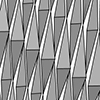
This is the continuation of a very old parametric model of a building facade, presented here. I will introduce the basic Grasshopper definitions of several alternative designs. The first one is the rhombus facade. The first part of the algorithm deals with the necessary data collection. We reference a polyline from the Rhino model as the path that the facade will follow. After that, we create vertical lines around the […]